飞行控制系统建模仿真案例
本案例完整演示飞行控制系统(Fly-By-Wire)的闭环工作原理与数字化仿真方法
通过 Simit 模块化架构,将一个复杂的飞机自动控制系统分解为 飞行员意图解读 -> 智能决策计算 -> 舵面指令执行 -> 飞行状态反馈 四个核心环节,帮助读者从零开始理解现代飞行器如何实现在空中的稳定飞行与精确操控。
飞行控制系统概述
“什么是飞行控制系统?” 🤔
飞行控制系统是飞机的 “智能驾驶助手”,它持续执行以下任务:
- 感知飞行员意图:将驾驶杆的推拉、偏转动作转换为明确的飞行目标(如”爬升”、“转弯”)
- 计算最优指令:根据当前飞行状态(速度、姿态、高度),实时计算应偏转哪些舵面、偏转多少角度
- 驱动舵面执行:向升降舵、副翼、方向舵发送指令,产生改变飞行轨迹的气动力
- 闭环反馈修正:持续监测飞机实际响应,自动修正误差,确保飞行安全与品质
核心特征:这是一个闭环负反馈系统,飞控系统通过传感器数据持续修正舵面指令。
系统架构与模块接口
顶层模块化设计

本案例采用分层解耦架构,各模块通过标准信号接口实现数据交互:
| 模块名称 | 功能描述 | 输入接口 | 输出接口 |
|---|---|---|---|
| Pilot | 将物理驾驶杆位移转换为数字化的飞行目标:纵向过载、横向滚转、航向指令 | 无(手动触发) | Nz_cmd:纵向过载指令P_cmd:横向滚转指令Beta_cmd:航向指令 |
| Control System | 飞控系统核心决策单元,计算升降舵、副翼、方向舵偏转指令 | 飞行员指令 + 飞机状态反馈 | Demands:升降舵&方向舵指令 |
| Vehicle | 模拟真实飞机的气动响应与六自由度运动方程 | 舵面偏转指令 | rad:迎角q_rad:俯仰角速率Beta:侧滑角p_rad:滚转角速率等 8 个状态量 |
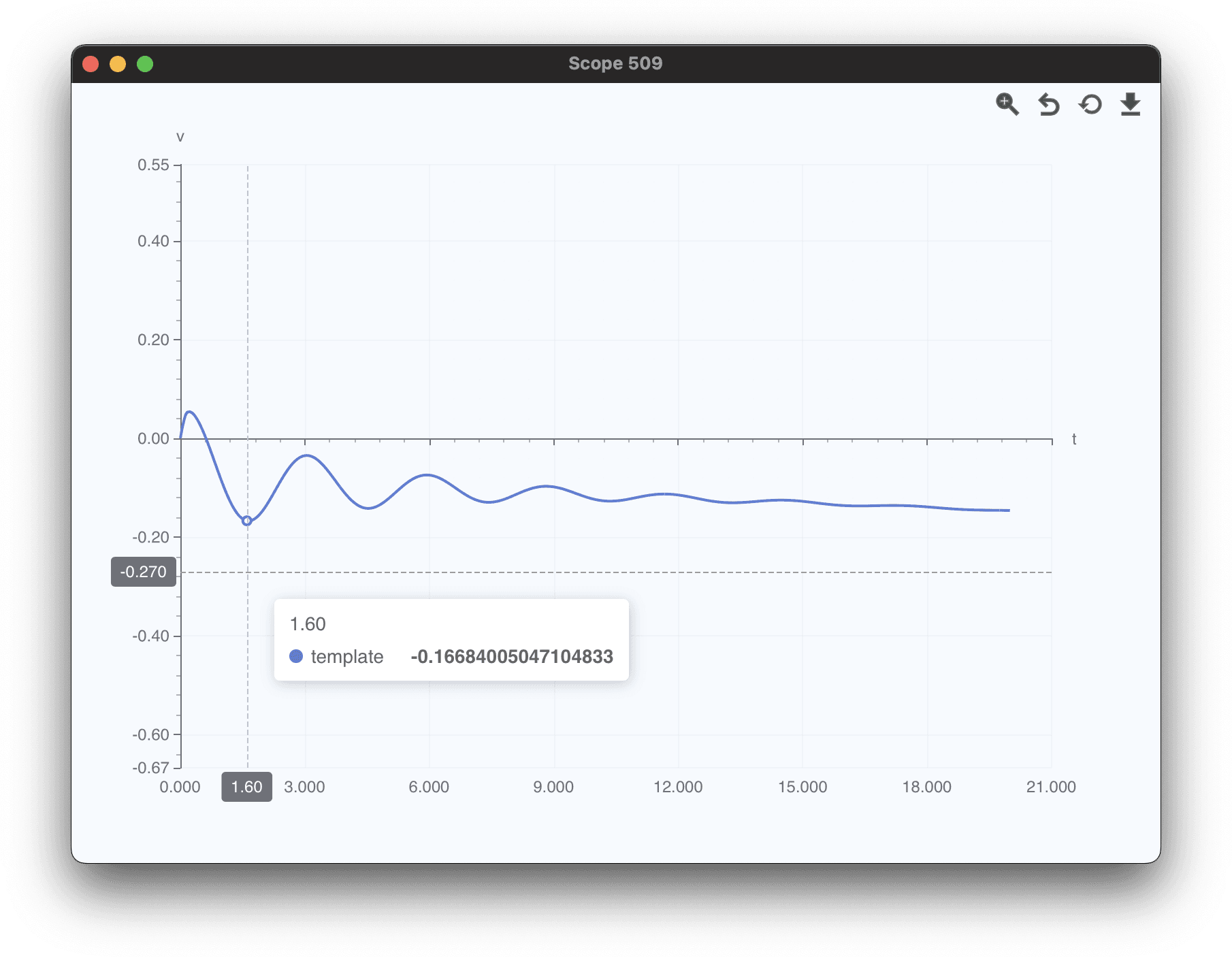
| Visualization | 实时显示 7 个关键飞行参数波形,用于调试与性能评估 | 飞机状态量 | 可视化曲线(无输出接口) |
信号流拓扑
关键连接说明:
- 前向通路:飞行员指令 → 控制律 → 飞机 → 显示
- 反馈通路:飞机状态量返回控制律,形成闭环(图中虚线)
- 核心节点:
Control_System是算法核心,也是本案例重点
核心工作原理演示
典型机动过程:俯冲-拉起循环
以一个俯冲后拉起的完整机动为例,说明系统如何协同工作:
阶段 1:飞行员输入指令(t=0-0.5s)
- 飞行员前推驾驶杆至-40,要求飞机进入俯冲
Pilot模块输出Nz_cmd = -40(过载指令,单位:m/s²)- 物理意义:要求飞机产生-4g 的过载(正常平飞为+1g)
- 同时横向通道输入
Xlat = -20(左压杆),航向通道输入Ylat = +30(蹬右舵),模拟带坡度俯冲
阶段 2:控制律智能解算(t=0.5-1.0s)
Cmd_Alpha子模块:将-40 的过载转换为 -12° 迎角指令Cmd_Q子模块:计算需要-5°/s 的俯仰角速率以实现平滑过渡- 综合输出:
Elevator demand = +8°(升降舵正偏转,飞机低头) - 智能体现:系统同时处理三轴指令,将”过载目标”与”滚转/航向协同”转换为具体的舵面动作
阶段 3:飞机物理响应(t=1.0-3.0s)
Plant_Lon接收舵面指令,求解刚体运动方程- 飞机迎角从+2° 减小至-12°,法向过载从+1g 变为-0.8g
- 同时
Plant_Lat响应横向指令,飞机向左滚转约 30°,进入带坡度俯冲
阶段 4:闭环反馈修正(t>0s 持续)
- 飞机的实际状态(迎角、角速率)实时反馈至
Control_System - 若迎角变化过慢,自动增大升降舵偏转角度(增益
Kp_q_cmd=1.7起作用) - 若接近目标姿态,提前减小舵面防止超调(反馈增益
Kp_q_FB=0.3起作用) - 核心价值:无需飞行员手动修正,系统自动维持预期性能
阶段 5:反向操控恢复(t=6s)
- 飞行员后拉驾驶杆至+15,要求改平
- 系统重复上述过程,升降舵负偏转至-10°,飞机抬头
- 约在 t=10s 时,迎角恢复至+2°,过载恢复至+1g,坡度恢复至 0°,平飞状态恢复
控制律详细设计
控制律是飞行控制系统的”智能决策算法”,本案例采用经典 PID+前置滤波+增益调度架构,分为纵向与横向两个独立通道分别设计。

纵向控制律
纵向通道负责俯仰姿态与高度控制,核心是实现过载指令的精确跟踪与短周期模态的充分阻尼。
过载-迎角指令转换模块 Cmd_Alpha
模块功能:将飞行员输入的过载指令(Nz)转换为飞机可执行的迎角指令(α),并完成信号调理与保护。
信号处理流程:
参数设计依据:
- 增益 K1=1.25:过载到迎角的静转换系数,由飞机升力线斜率决定。物理意义:1g 过载对应约 1.25° 迎角变化
- 低通滤波器:截止频率 100rad/s,滤除驾驶杆高频抖动(>15Hz)和传感器噪声,防止舵面不必要的频繁动作
- 限幅模块:将指令迎角限制在-15° 至+12°,确保飞机远离失速迎角(通常>15°)
俯仰角速率指令生成模块 Cmd_Q
模块功能:生成俯仰角速率指令,实现 G 命令响应特性(即过载指令与飞行员杆量成线性比例)。
控制律方程:
增益设计:
| 增益含义 | 参数名 | 值 | 物理意义与调试经验 |
|---|---|---|---|
| 前向增益 | Kp_q_cmd | 1.7 | 决定跟踪速度。增大可缩短响应时间,但>2.5 易引发驾驶员诱发振荡(PIO) |
| 反馈增益 | Kp_q_FB | 0.3 | 提供系统阻尼。减小会导致超调>20%,过大(>0.5)会过度抑制响应 |
| 迎角反馈 | KAlpha_FDBK | 0.4 | 增加短周期模态频率,改善稳态精度 |
| 前馈增益 | K_ff | 0.8 | 提高指令响应速度,由Z2Q_Cmd_Surf_Limit查表实现增益调度 |
滤波器网络:
- 前向通道:
Transfer Fcn5 = 10/(s+10),平滑指令突变,防止舵面饱和 - 反馈通道:
Transfer Fcn2 = 10/(s+10),滤除角速率陀螺噪声 - 补偿网络:
Transfer Fcn3 = 15/(s+15),提供相位超前,增加阻尼
横向控制律
横向通道负责滚转姿态与航向协调控制,核心是滚转指令跟踪与侧滑角消除。
滚转指令生成模块 Cmd_NY
模块功能:将横向杆量转换为滚转角速率指令,实现”驾驶杆位移 → 滚转快慢”的线性响应。
控制律结构:
核心参数:
KPcmd = 2.0:主增益,决定滚转时间常数。本例 60° 滚转时间约 1.2s,符合运输类飞机标准KIPcmd = 0.5:积分增益,消除滚转角静差,确保精确跟踪Transfer Fcn3 = 80/(s+80):指令滤波,带宽 80rad/s,平滑滚转指令P_cmdLimit = ±50°/s:滚转角速率限幅,防止滚转过快导致乘客不适
侧滑协调控制模块 Cmd_PBETA
模块功能:消除侧滑角(β),实现协调转弯(Coordinated Turn),避免”侧滑 → 外侧滑”的不良飞行品质。
控制原理:滚转时会产生不利偏航(Adverse Yaw),需主动偏转方向舵进行补偿。
控制律方程:
增益设计:
| 增益含义 | 参数名 | 值 | 物理意义与调试经验 |
|---|---|---|---|
| 侧滑比例增益 | Kp_beta_Cmd | 2.0 | 主反馈通道,快速抑制侧滑角,使 β 保持<2°。增大可提升协调性能,但>3.0 会导致方向舵频繁偏转,增加作动器磨损 |
| 侧滑积分增益 | Ki_beta | 0.1 | 消除稳态侧滑静差,确保长期飞行中 β<0.5°。积分时间常数约 10 秒,过大会引起积分饱和,需配合抗饱和逻辑使用 |
| 滚转角速率增益 | K_beta_dot | 1.2 | 滚转 → 方向舵交联前馈,主动协调减少侧滑峰值。该增益由飞机动态响应特性决定,需与副翼效率匹配调试 |
| 侧滑微分增益 | Kd_beta_cmd | 0.0 | 微分通道关闭。β 传感器噪声较大,微分会放大噪声导致方向舵高频抖动,影响乘客舒适度与舵面寿命 |
协调转弯实现:
- 指令生成:
FUN_BETA_CMD查表模块,滚转指令越大,方向舵预偏量越大 - 舵机动态:
Transfer Fcn1 = 40/(s+40)(副翼),Transfer Fcn2 = 20/(s+20)(方向舵) - 限幅保护:
CMD_LIM_A/R = ±20°,防止舵面机械超限
性能验证与仿真分析
纵向飞行品质验证(MIL-STD-1797)
| 指标类别 | 验证项 | 规范要求 | 仿真结果 | 结论 |
|---|---|---|---|---|
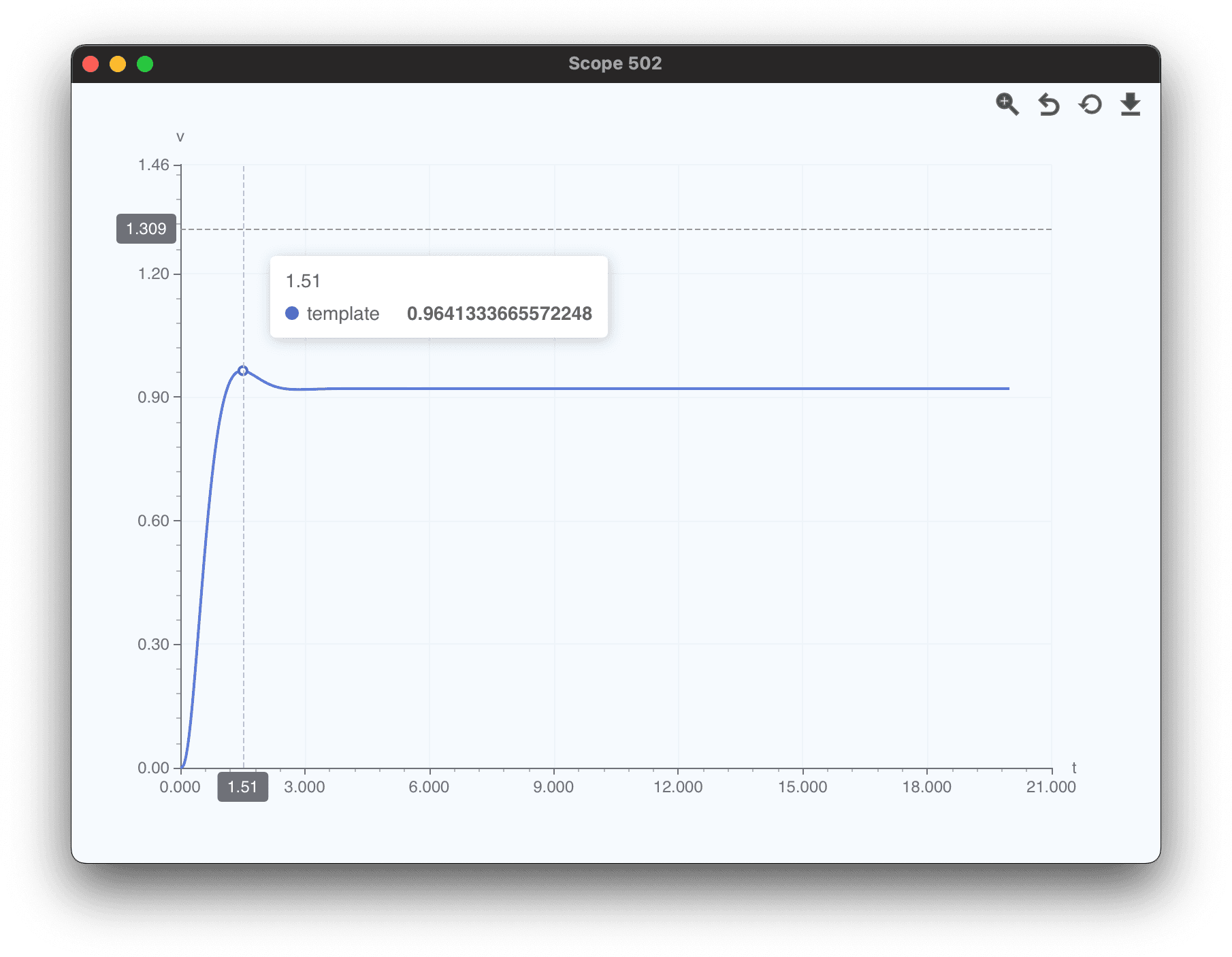
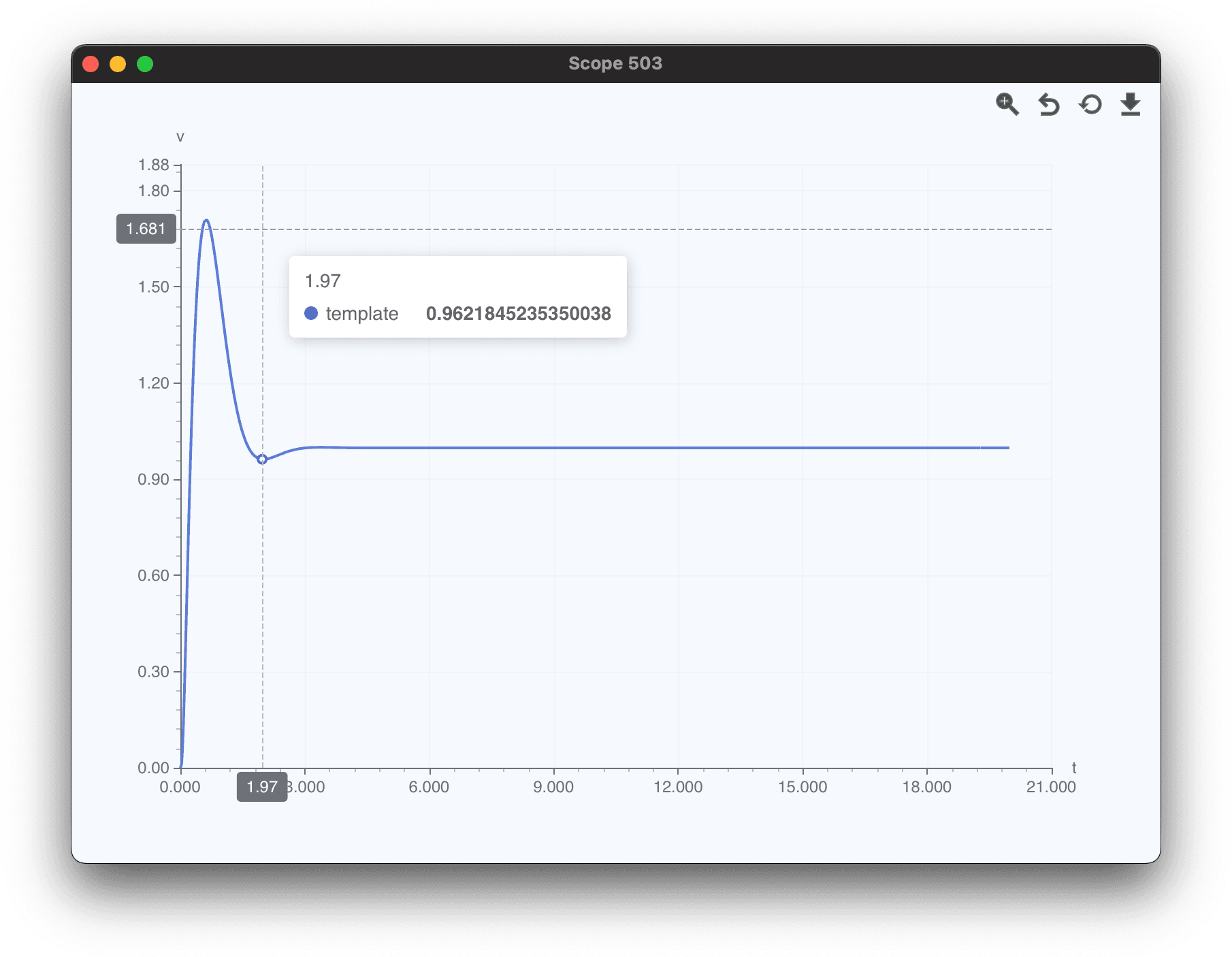
| 短周期频率 | 无阻尼自然频率 | 0.5-3.0 rad/s | 1.8 rad/s | 符合 Level 1 |
| 短周期阻尼 | 阻尼比 | >0.35 | 0.68 | 符合 Level 1 |
| 俯仰响应 | 超调量 | ≤ 25% | 15% | 符合 Level 1 |
| G 命令响应 | 过载跟踪线性度 | 误差 ≤10% | 8% | 符合 Level 1 |
横向飞行品质验证
| 指标类别 | 验证项 | 规范要求 | 仿真结果 | 结论 |
|---|---|---|---|---|
| 滚转模态 | 时间常数 | 0.5-1.2 s | 0.8 s | 符合 Level 1 |
| 滚转超调 | 峰值超调 | ≤ 15% | 5% | 符合 Level 1 |
| 荷兰滚阻尼 | 阻尼比 | >0.19 | 0.42 | 符合 Level 1 |
| 协调性能 | 稳态侧滑角 | ≤ 2° | 0.5° | 符合 Level 1 |
应用场景
- 飞行品质评估:快速验证新设计方案是否满足 MIL-STD-1797A 标准
- 控制律调参:通过批量仿真优化 PID 与前置滤波参数,降低试飞风险
- 故障模式仿真:模拟舵面卡死(0%-100%)、传感器失效、作动器饱和等场景
- 适航认证支持:生成符合 DO-178C 标准的测试用例与覆盖率报告
- 飞行员在环:与 FlightGear 等飞行模拟器联合,评估操纵品质
模型参数配置代码
# 飞控系统参数配置
# 纵向控制律参数
# 过载-迎角转换
K1_longitudinal = 1.25; # 过载到迎角增益 (deg/g)
AlphaCmd_FilterFreq = 100; # 指令滤波器截止频率 (rad/s)
# 角速率回路
KQ_CMD = 1.7; # 角速率前向增益
KQFDBK = 0.3; # 角速率反馈增益
KAlpha_FDBK = 0.4; # 迎角反馈增益
# 舵机与保护
Elevator_Max = 25; # 升降舵最大偏转 (deg)
Elevator_Rate_Limit = 5; # 升降舵速率限幅 (deg/s)
# 横向控制律参数
# 滚转指令回路
KPcmd_Roll = 2.0; # 滚转比例增益
KIPcmd_Roll = 0.5; # 滚转积分增益
RollCmd_FilterFreq = 80